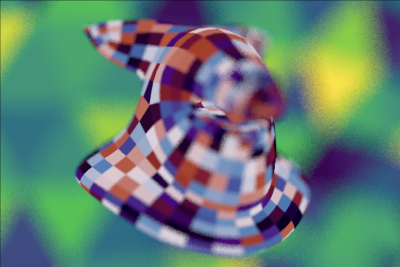
Using two grids as sensor and focus plane along with VEX to render primitive colors to a grid with depth blur.
The point wrangle sets random samples around each sensor pixel defined by sample_circle_uniform within an aperture radius. The intersect function shoots rays at the corresponding point on the focus plane. Once all primitive colors are stored inside the clr[] array, their average avg is exported as v@Cd.
int samples = chi('samples');
float aper = chf('aperture');
int stoch = chi('stochastic');
vector clr[] = {};
for(int i = 0; i < samples; i++){
float c = i / float(samples-1);
vector2 u = set(1.0 - c, c);
if(stoch == 1) u = rand(i@ptnum, i);
vector2 a = sample_circle_uniform(u);
vector pos = v@P + vector(a) * aper;
vector dir = normalize(v@opinput1_P - pos);
int prim_hit = intersect(2, pos, dir * 10.0, set(0), set(0));
if(prim_hit >= 0){
vector clr_hit = prim(2, 'Cd', prim_hit);
append(clr, clr_hit);
}
}
v@Cd = avg(clr);